人口红利的消失伴随着智能制造、5G、自动驾驶和人工智能的发展,机器人不仅在军事、服务、娱乐等领域取代人类,还将在制造业上大篇幅替代工人。机器人产业也会被进一步带动起来,在机遇与挑战并存的环境下,我国机器人制造企业如何在“进口垄断”和“技术壁垒”中突围而出是国产机器人厂商亟待解决的问题。

机器人的产业链有上游原材料、核心零部件、本体制造与系统集成等环节。其中,核心零部件是工业机器人最重要的组成部分,也是机器人核心技术壁垒所在。
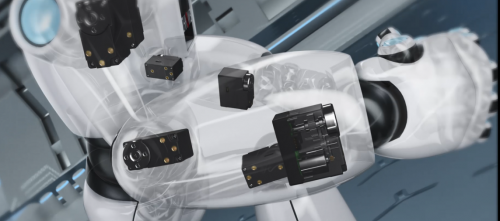
深圳市兆威机电股份有限公司(以下简称“兆威”)联合机器人制造厂商在微型传动系统方面和关节部件构赋能机器人实现智能化科技化。通过对机器人关节结构分析和运动原理的设想测试,对关节舵机的结构的进行了优化让关节舵机拥有更好的灵活性,可以大力矩小体积的关节电机在在狭小的空间更好的移动。将市场需求与产品研发结合起来,不断满足机器人客户的产品升级的差异化需求。
众所周知,智能机器人是一个机电一体化产品,由三大部分、六个子系统组成,三大部分分别是机械部分、传感部分、控制部分,六个子系统分别是:驱动系统、机械结构系统、控制系统、人—机交互系统、感受系统、机器人—环境交互系统。
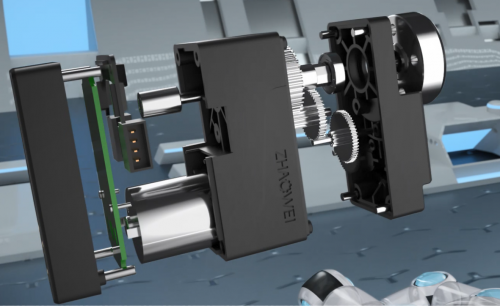
电机是智能机器人产业链上关键的一环,机器人关节更是机器手臂上应用的部件之一。随着机器人关节应用范围的广泛,机器人手臂亟需进行产品升级,这也对电机提出了更高要求。现有机器人手臂电机普遍存在规格多、批量小、零件的通用性差、成本高,质量与可靠性都不稳定的问题。一台机器人手臂能完成任务的范围受其自身的机械结构的限制,使用减速电机,对机器人手臂进行结构优化正是解决该问题的关键技术之一。

兆威联合机器人制造厂家在微型传动系统方面对机器人手臂齿轮箱电机进行结构优化,通过发展耐磨材料技术、加工工艺优化技术、润滑技术、装配技术、可靠性及寿命检测技术以及传动机理的探索,发展适合机器人手臂应用的效率、低重量减速器(齿轮箱),使其具备寿命长,工作稳定,高精密度等特点,避免了机器人手臂控制电缆的磨损和缠绕问题,更好满足六自由度机器人的传动需,大大提了智能机器人感知与识别、机构与传动、控制与交互等方面的性能。
据IFR统计,我国工业机器人密度在2017年达到97台/万人,已经超过全球平均水平,预计我国机器人密度将在2021年突破130台/万人,达到发达国家平均水平,工业机器人市场规模将突破70亿美元。
当前,国内市场对机器人的需求正保持快速增长,带动机器人关节减速器的新增需求以近20%的年复合增长率快速增加,预计到2025年全球精密减速器的市场销售规模将超过600亿元,其中国内市场销售规模将超过全球的1/4。
机器人关节减速器是机器人的核心零部件之一,而下游系统集成则是机器人商业化、大规模普及的关键。目前国际上具备大规模生产能力且产品性能可靠的机器人减速器制造企业较少,全球绝大多数市场份额已被日本企业占据。国产机器人减速器价格虽然便宜,供货期短,但产品性能与国外产品存在较大差距。因此,国产减速器大多只能供给中、低端机器人使用,无法满足高端机器人市场需求。“技术壁垒”突围是国产机器人制造厂家走向蓝海的必选之路。兆威机器人关节舵机通过输入轴上的小齿轮,啮合输出轴上的大齿轮,从而达到降低转速,增加转矩的目的,去改善动态性能。机器人本体是机器人产业发展的基础,而下游系统集成则是机器人商业化、大规模普及的关键。
厚积而能薄发,通过微型传动系统及精密齿轮零部件的不断加码,机器人关节部件的参数、功能、零部件不断调整优化,机器人微型传动的产品将会越来越成熟。兆威在智能驱动系统方面为广大智能机器人制造厂商提供微型传动系统和电子驱动模块定制化解决方案。机器人厂商可以根据不同轴数和运动要求来设计定制适合自己机器人关节模组。兆威旨在降低机器人关节的制造门槛,助力中国机器人厂商制造出真正有竞争力和差异化的国产机器人,改写机器人产业格局,为国家智能制造进程助一“臂”之力。伴随着国内消费升级和社会老龄化速度加快、劳动力不足以及人力成本上升、技术发展成熟等主要原因,我国对机器人的需求逐渐加大,尤其是在家用、教育以及公共服务等领域的机器人需求持续旺盛,未来市场上对机器人需求潜力巨大。通过“关节”部件产品结构升级去突围抢占国际市场迎战新蓝海,正成为国产机器人制造行业努力和思考的方向。