ChatGPT 催生了人工智能发展新浪潮," 离身 " 智能逐步向 " 具身 " 智能进化。工业现场的各类机器人也正完成由 " 不动 "、到 " 固定动 "、再到 " 自由动 " 的技术变革。
自今年 3 月微亿智造于业界首次提出 " 具身智能工业机器人(EIIR)" 以来,我们分别从感知、驱动、控制及算法等各方面进行了相关的技术研究与突破,请紧随我们的笔触,共同窥见 EIIR 当前的研发进展。
视觉伺服
传统的工业视觉基本由机器人 IO 或 PLC IO 使用硬触发来取图,再根据图像结果来执行指令。这样的方式经常会引发节拍不够的问题,比如需要二次定位的场景,机械臂运动速度就会因此降低。
为了以对象为中心、以任务为导向,并保证生产节拍,我们必须开始视觉伺服的研发,涉及到高速推理、高速控制闭环、零延时的运动机构执行等关键技术点。
在 "接抛球" 实验中,图像到运动的闭环速度达到了 16ms,这个数字仍然在继续优化。这改变了以往工业机械臂只是被当作点对点操作工具的用法,已然成为对对象的操作工具。这样的转变,从根本上变更了它的属性。

实时重建
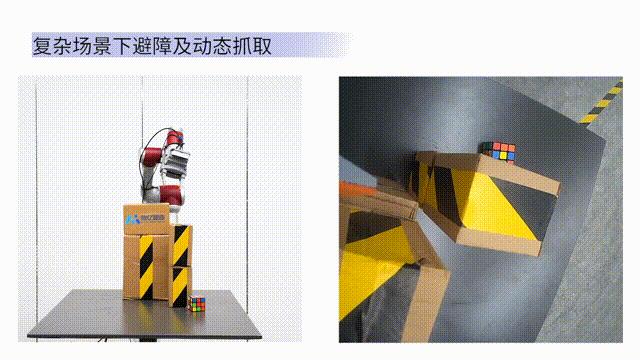
针对对象做加工,也就意味着所有的动作目标均是实时生成的,在运动过程中需要实时对环境进行感知和避障。我们采用基于 3D GS 的精细重建和八叉树实时重建结合的方案,大幅度提高了机械臂的感知能力和语义理解能力。
目前的重建周期大约 60ms 左右,随着相关算法优化,该方案的重建周期可以压缩到 20ms,满足高速运行的要求。对于工业现场而言,能够更好的适应环境变化而无需设计各类过渡点。
基于此项技术进展,在" 复杂场景下避障及动态抓取" 实验中,工作人员可以任意改变被抓取物的位姿,以及改变周边环境,机械臂均可以重建刷新局部地图并迅速找到可行解,体现了与外部环境交互的智能性。
动态避障
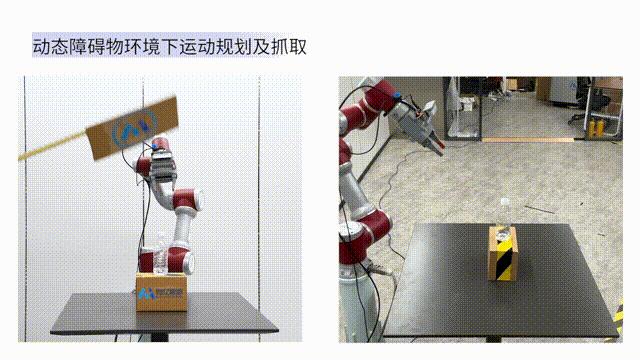
由于机械臂的规划空间维度较高,如何在视觉闭环的时间级别上完成运动规划,并形成可被执行的 ms 级轨迹,成为了新的挑战。
我们在路径规划时,采用基于优化和采样结合的方案,40ms 内完成点到点路径规划,同时保证路径长度合理性和高成功率。轨迹生成在机械臂 6 轴关节速度、加速度、加加速度三阶约束下,指定多个待通过路径点,计算耗时 10ms 内,生成距离和速度最优轨迹。
例如在 "动态障碍物环境下运动规划及抓取" 实验中,工作人员通过遮挡的方式阻止机械臂的运动,在瞬间机械臂完成了环境地图刷新、柔顺刹车、重规划,体现了环境安全、人员安全以及任务安全的特性。
复合高精度抓取
我们将以上点组合起来构成了 EIIR 的基础能力,在保证动态抓取误差 1mm 精度的情况下,目前完成 "复合高精度抓取" 这个任务仅需要 150ms的额外计算时间。
无需设计路径,也无需保证环境一致性,给机器人的信息只有 : 抓取那个对象,这样简单的指令,助力工业现场完成迅速的切线。请期待 150ms 继续被压缩,也请期待 1mm 继续被压缩。
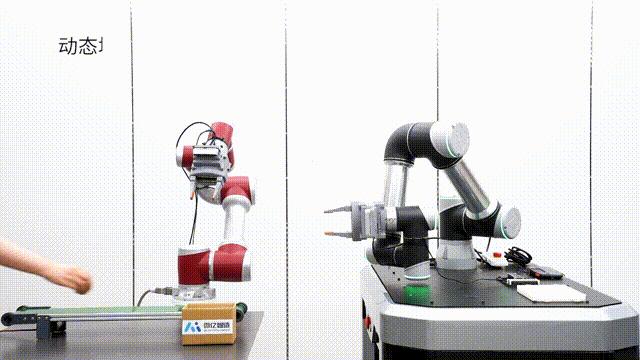
在 "动态场景下的多臂协同 "实验中,工作人员通过多种手段干扰协作任务的执行,机械臂仍然准确执行了所有预定动作,这证明了机械臂所执行的指令相对于传统机械臂来讲更加高级。
具身智能标志着人工智能的一个重大转变,它不再仅仅是软件和算法的集合,而是通过具体的物理实体与现实世界直接接触和互动。EIIR 将作为一个前所未有的物种进入工业现场,一个更智能的未来正向我们走来。